Detect chessboard
import multicam_calibration as mcc
board_shape = (5,7)
square_size = 12.5
camera_names = ['top', 'side1', 'side2', 'side3', 'side4', 'bottom']
prefix = '../../tests/example_data/example_calibration'
video_paths = [f'{prefix}.{camera}.mp4' for camera in camera_names]
# detect calibration object in each video
all_calib_uvs, all_img_sizes = mcc.run_calibration_detection(
video_paths, mcc.detect_chessboard, n_workers=6,
detection_options=dict(board_shape=board_shape, scale_factor=0.5))
# display a table with the detections shared between camera pairs
mcc.summarize_detections(all_calib_uvs)
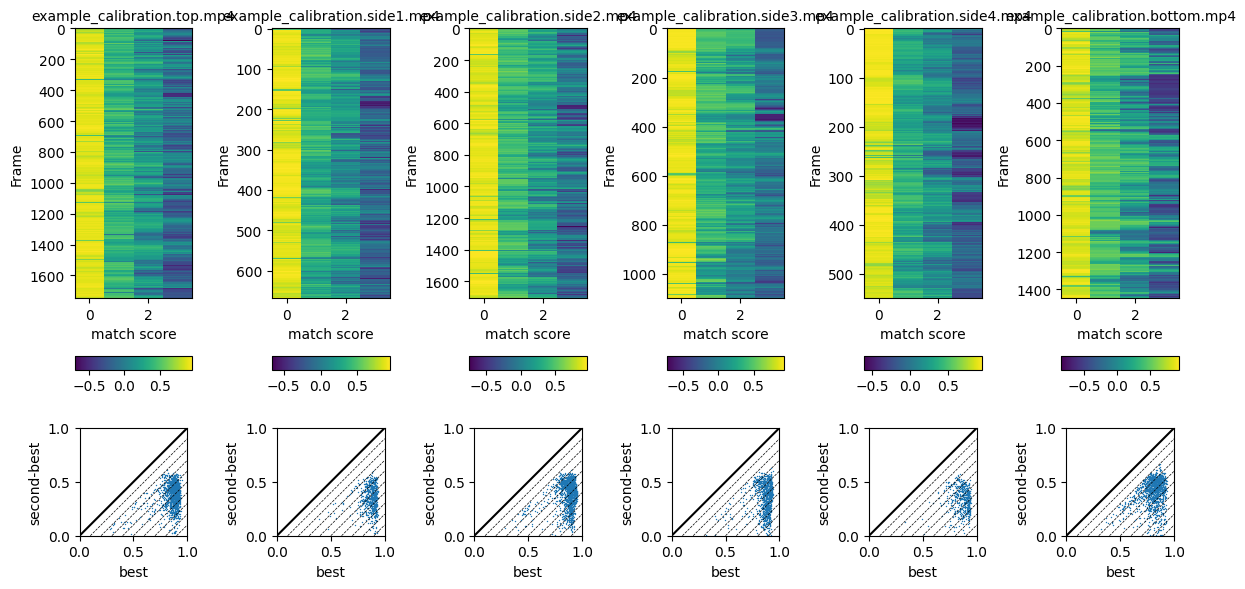
# plot corner-match scores for each frame
fig = mcc.plot_chessboard_qc_data(video_paths)
# optionally generate overlay videos
# for p in video_paths:
# mcc.overlay_detections(p)
Calibrate
Initialization
calib_objpoints = mcc.generate_chessboard_objpoints(board_shape, square_size)
all_extrinsics, all_intrinsics, calib_poses, spanning_tree = mcc.calibrate(
all_calib_uvs, all_img_sizes, calib_objpoints, root=0, n_samples_for_intrinsics=100)
Estimating camera intrinsics
100%|█████████████████████████████████████| 6/6 [01:00<00:00, 10.12s/it]
Initializing calibration object poses
100%|█████████████████████████████████████| 6/6 [00:02<00:00, 2.21it/s]
Estimating camera extrinsics
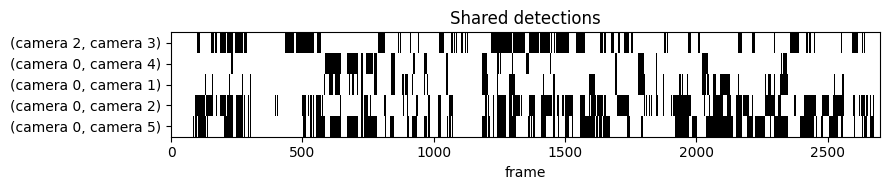
Merging calibration object poses
fig, shared_detections = plot_shared_detections(all_calib_uvs, spanning_tree)
fig, median_error, reprojections, transformed_reprojections = mcc.plot_residuals(
all_calib_uvs, all_extrinsics, all_intrinsics, calib_objpoints, calib_poses, inches_per_axis=3)
100%|█████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 6/6 [00:01<00:00, 4.58it/s]

Bundle adjustment
adj_extrinsics, adj_intrinsics, adj_calib_poses, use_frames, result = \
mcc.bundle_adjust(all_calib_uvs, all_extrinsics, all_intrinsics, calib_objpoints, calib_poses, n_frames=5000, ftol=1e-4)
Excluding 199 out of 2130 frames based on an outlier threshold of 3.428785613103967
Iteration Total nfev Cost Cost reduction Step norm Optimality
0 1 9.7568e+04 7.50e+06
1 3 7.8176e+04 1.94e+04 1.02e+02 1.01e+07
2 6 4.3648e+04 3.45e+04 1.62e+01 3.31e+06
3 7 4.1601e+04 2.05e+03 3.18e+01 4.44e+05
4 8 3.7025e+04 4.58e+03 9.18e+00 2.13e+05
5 9 3.6771e+04 2.54e+02 1.93e+01 2.27e+05
6 10 3.5528e+04 1.24e+03 5.45e+00 1.82e+05
7 12 3.5078e+04 4.50e+02 2.40e+00 1.75e+05
8 14 3.4917e+04 1.61e+02 8.61e-01 1.77e+05
9 15 3.4797e+04 1.19e+02 7.64e-01 1.74e+05
10 16 3.4665e+04 1.32e+02 9.95e-01 1.48e+05
11 17 3.4490e+04 1.75e+02 1.01e+00 1.29e+05
12 18 3.4263e+04 2.26e+02 1.66e+00 1.20e+05
13 19 3.4076e+04 1.88e+02 2.17e+00 1.15e+05
14 20 3.3939e+04 1.37e+02 3.31e+00 9.48e+04
15 21 3.3794e+04 1.44e+02 8.53e+00 8.92e+04
16 22 3.3596e+04 1.98e+02 1.86e+01 7.80e+04
17 23 3.3379e+04 2.16e+02 3.89e+01 2.42e+05
18 24 3.3304e+04 7.53e+01 2.63e+01 1.03e+05
19 25 3.3287e+04 1.73e+01 1.82e+01 2.67e+04
20 26 3.3282e+04 4.65e+00 4.63e+00 4.55e+03
21 27 3.3280e+04 2.30e+00 4.29e+00 4.04e+03
`ftol` termination condition is satisfied.
Function evaluations 27, initial cost 9.7568e+04, final cost 3.3280e+04, first-order optimality 4.04e+03.
fig, median_error, reprojections, transformed_reprojections = mcc.plot_residuals(
all_calib_uvs[:,use_frames], adj_extrinsics, adj_intrinsics, calib_objpoints, adj_calib_poses, inches_per_axis=3)
100%|█████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 6/6 [00:01<00:00, 5.19it/s]

Save results
# save for JARVIS
save_path = f'{video_dir}/CalibrationParameters/'
mcc.save_calibration(all_extrinsics, all_intrinsics, camera_names, save_path, save_format='jarvis')
# save for GIMBAL
save_path = f'{video_dir}/camera_params.h5'
mcc.save_calibration(all_extrinsics, all_intrinsics, camera_names, save_path, save_format='gimbal')